
Měřený objekt, přístroje a snímače
Tématem je ukázkové měření charakteristických vlastností různých snímačů vzdálenosti, koncových spínačů, přesného odměřování polohy na strojích apod. (viz obr. 1 až 5) včetně ukázek vysvětlujících jejich princip a systém.
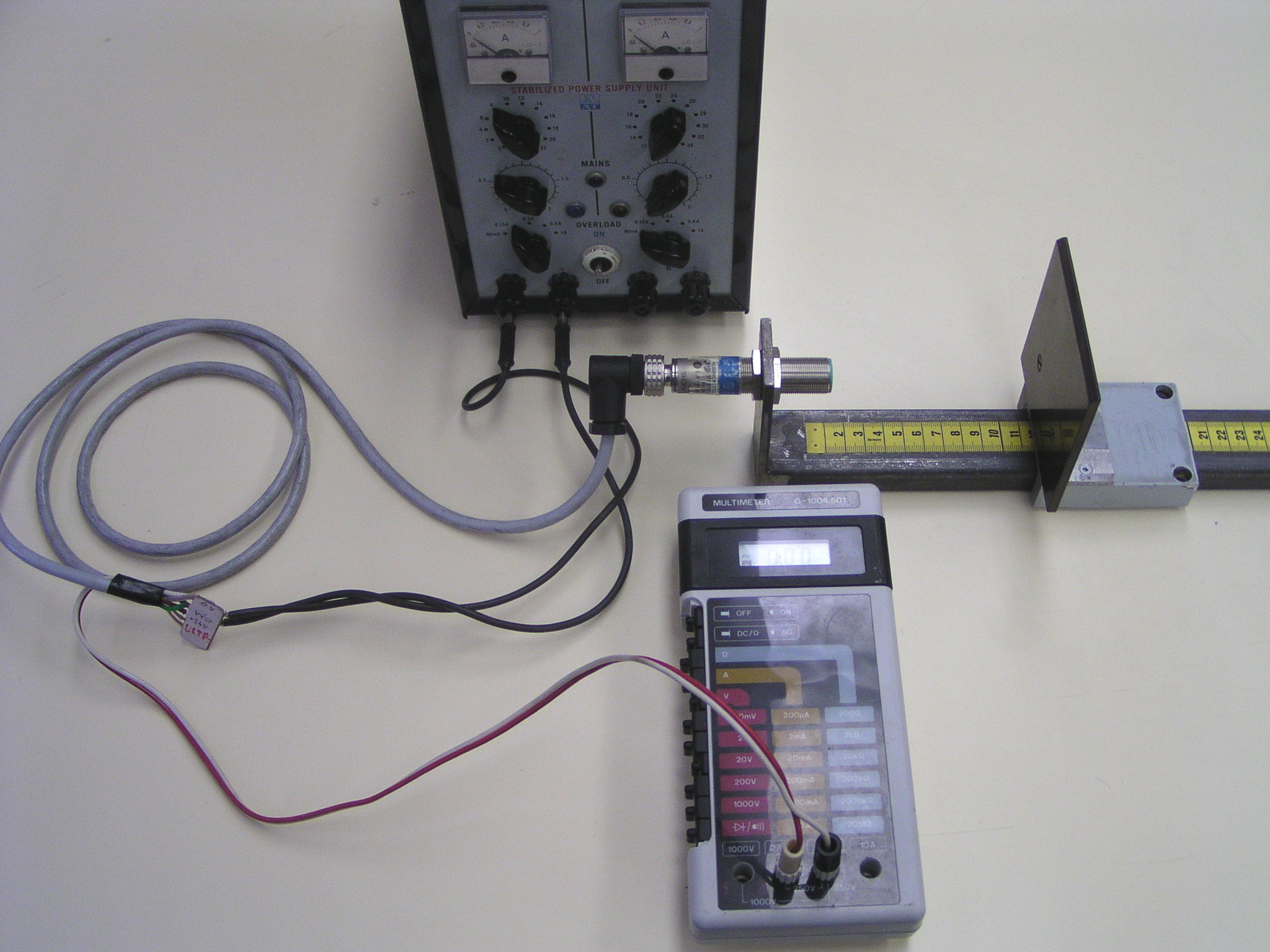
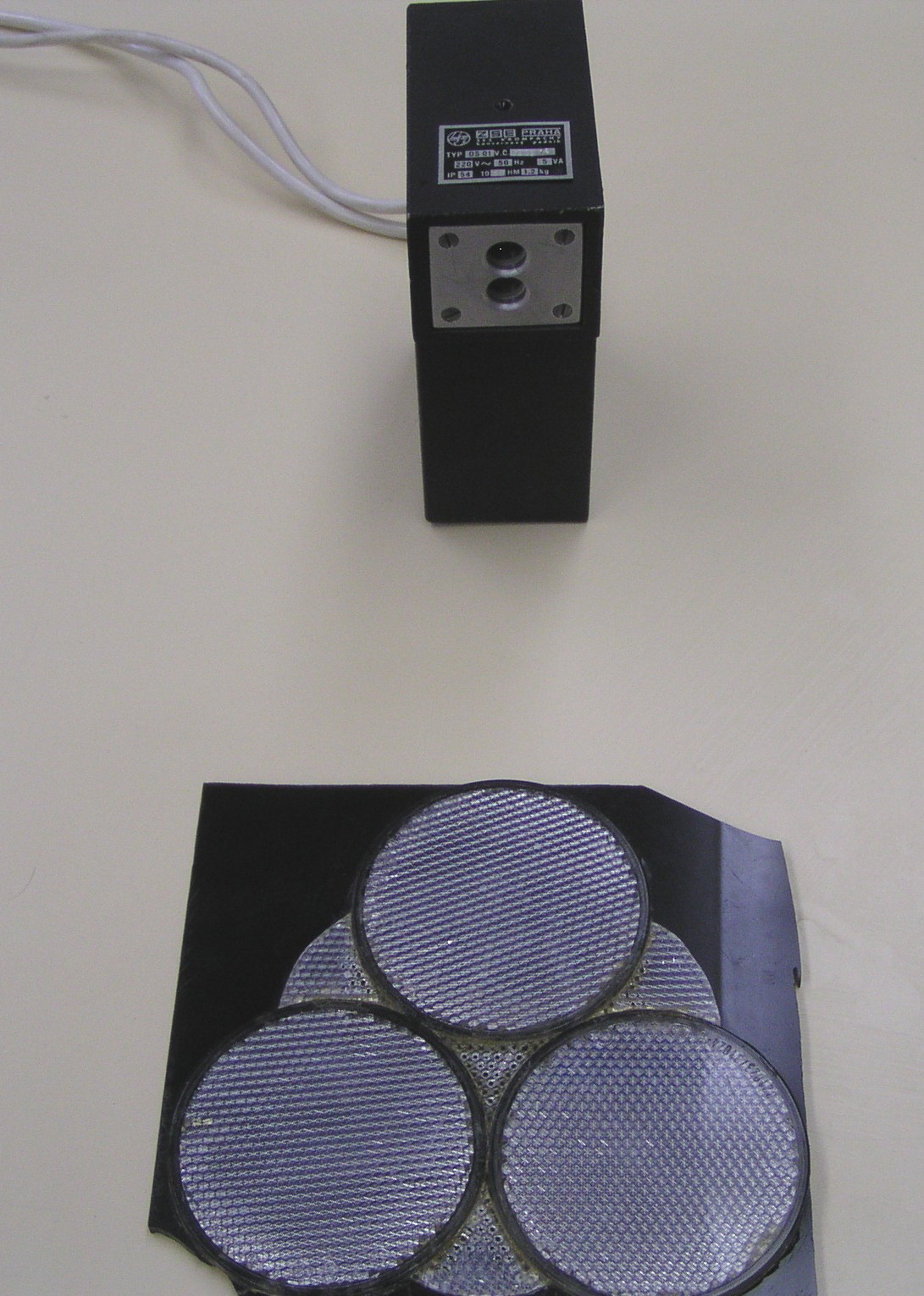
Obr. 1 - Ultrazvukový snímač vzdálenosti
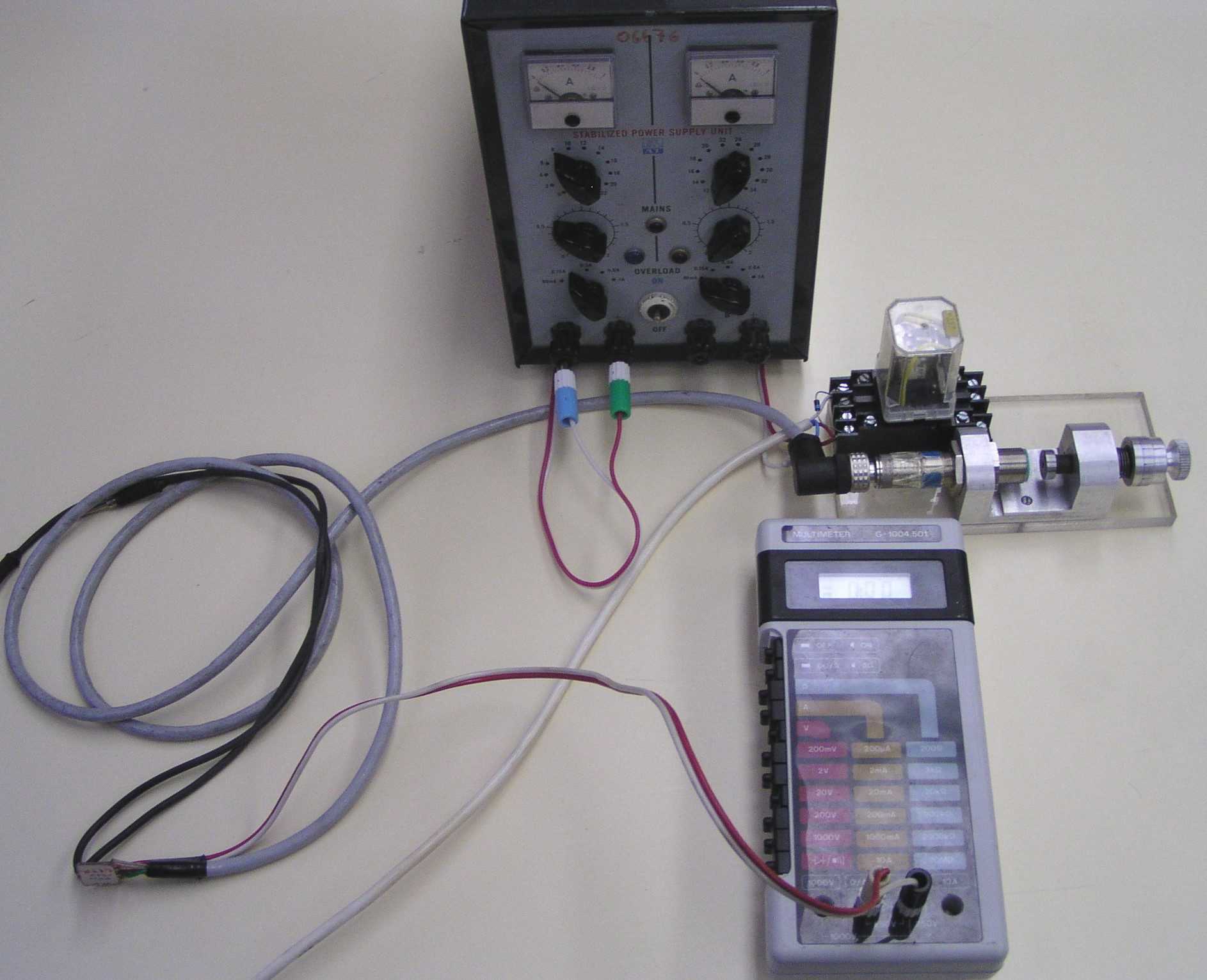
Obr. 2 - Indukční spojitý snímač vzdálenosti
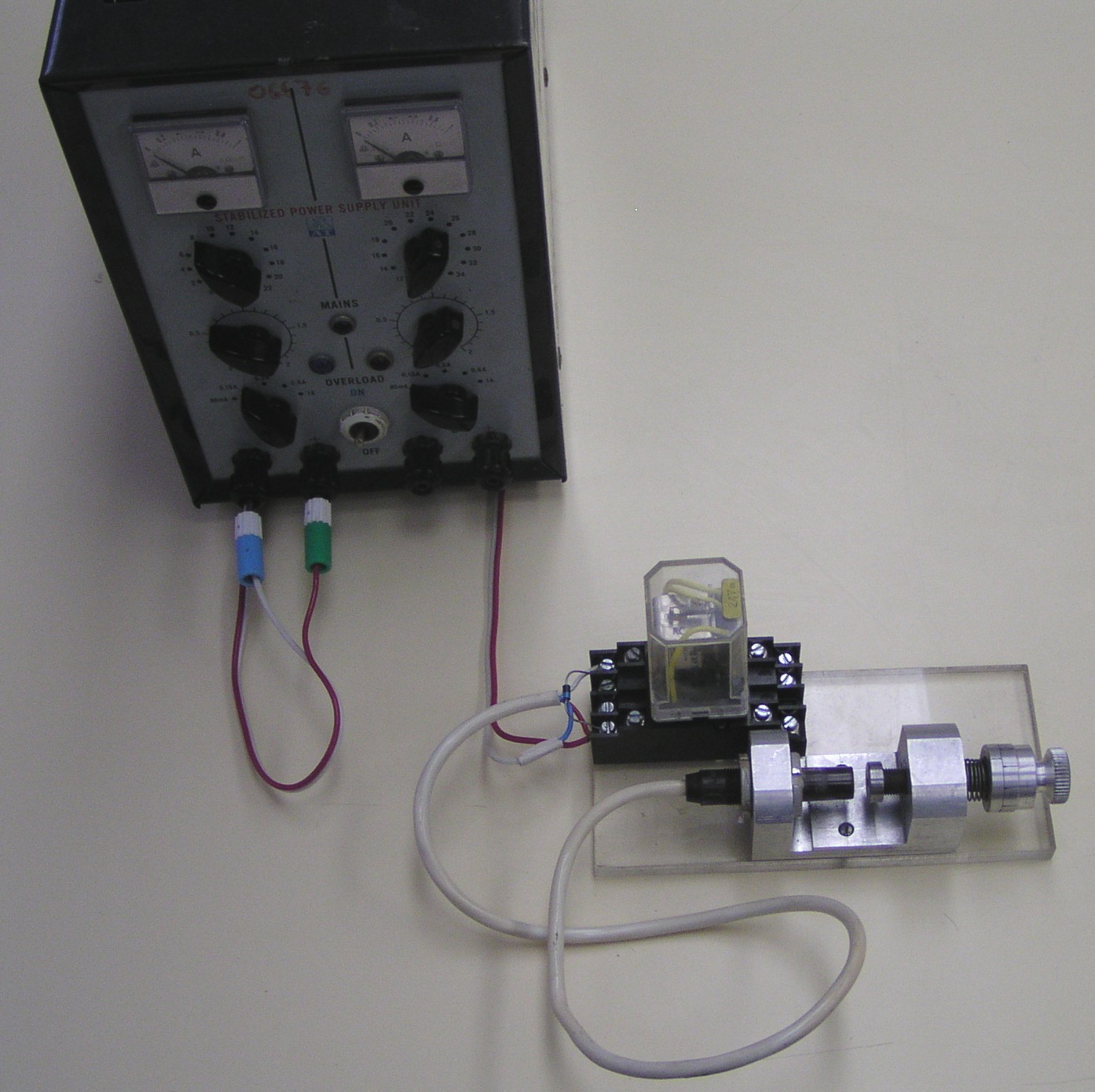
Obr. 3 - Indukční snímač polohy
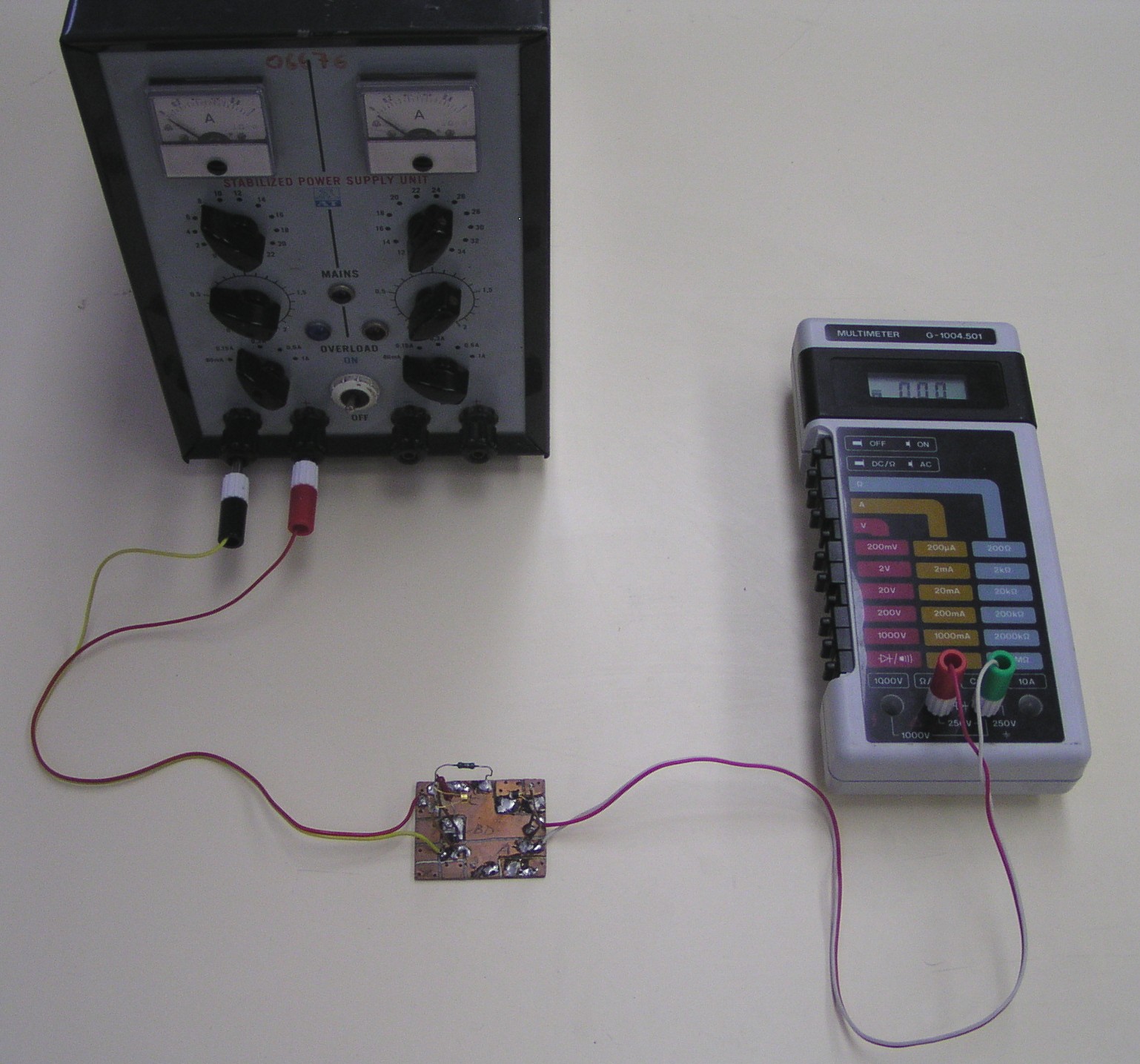
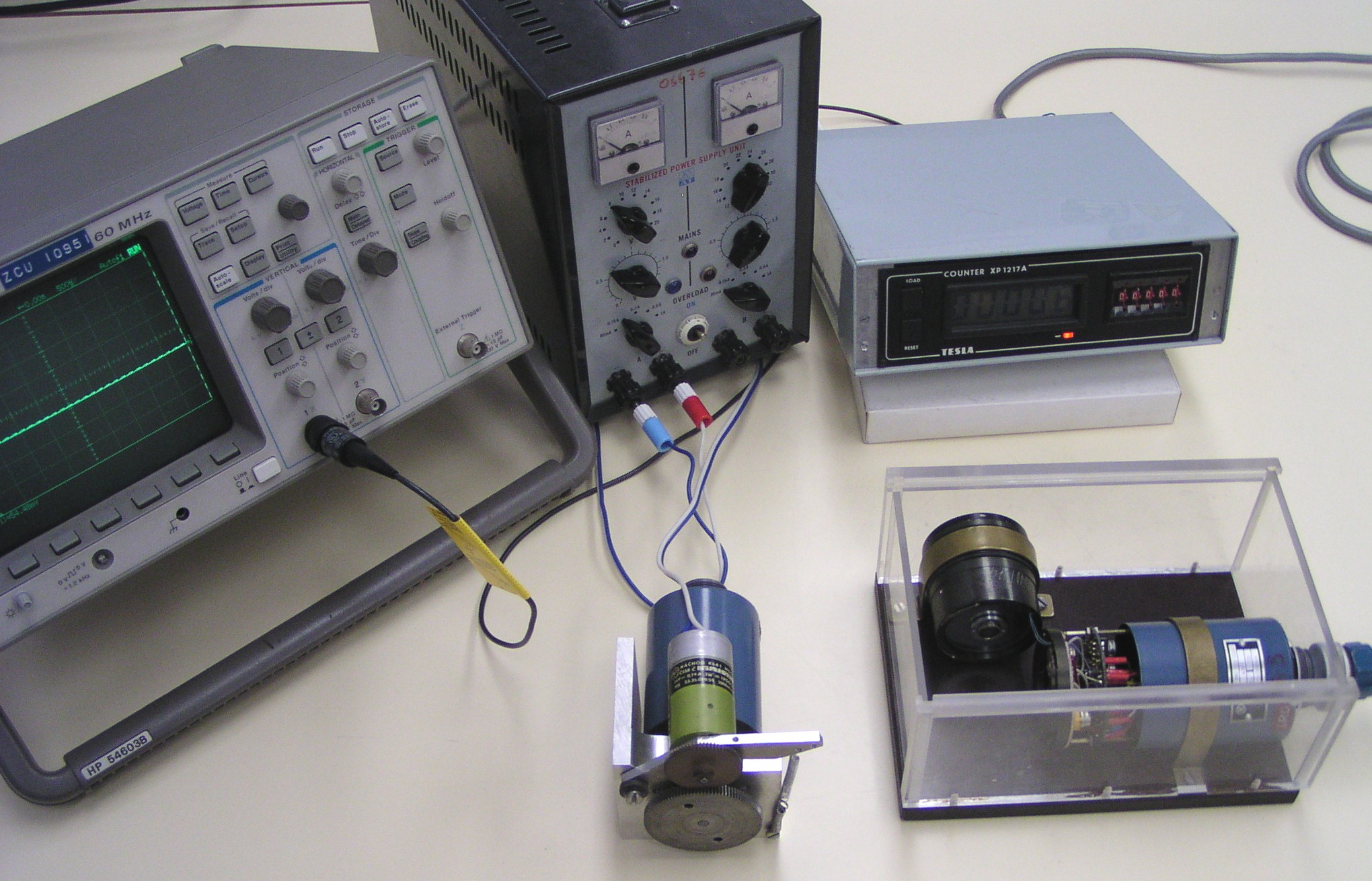
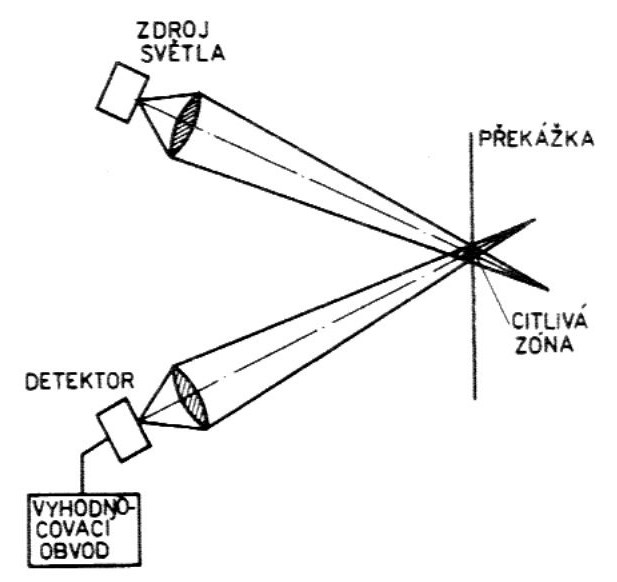
Obr. 4 - Optická závora jednocestná, stabilizovaný zdroj a digitální multimetr
Obr. 5 - - Optická závora proximitní
Obr. 6 - IRC snímač polohy
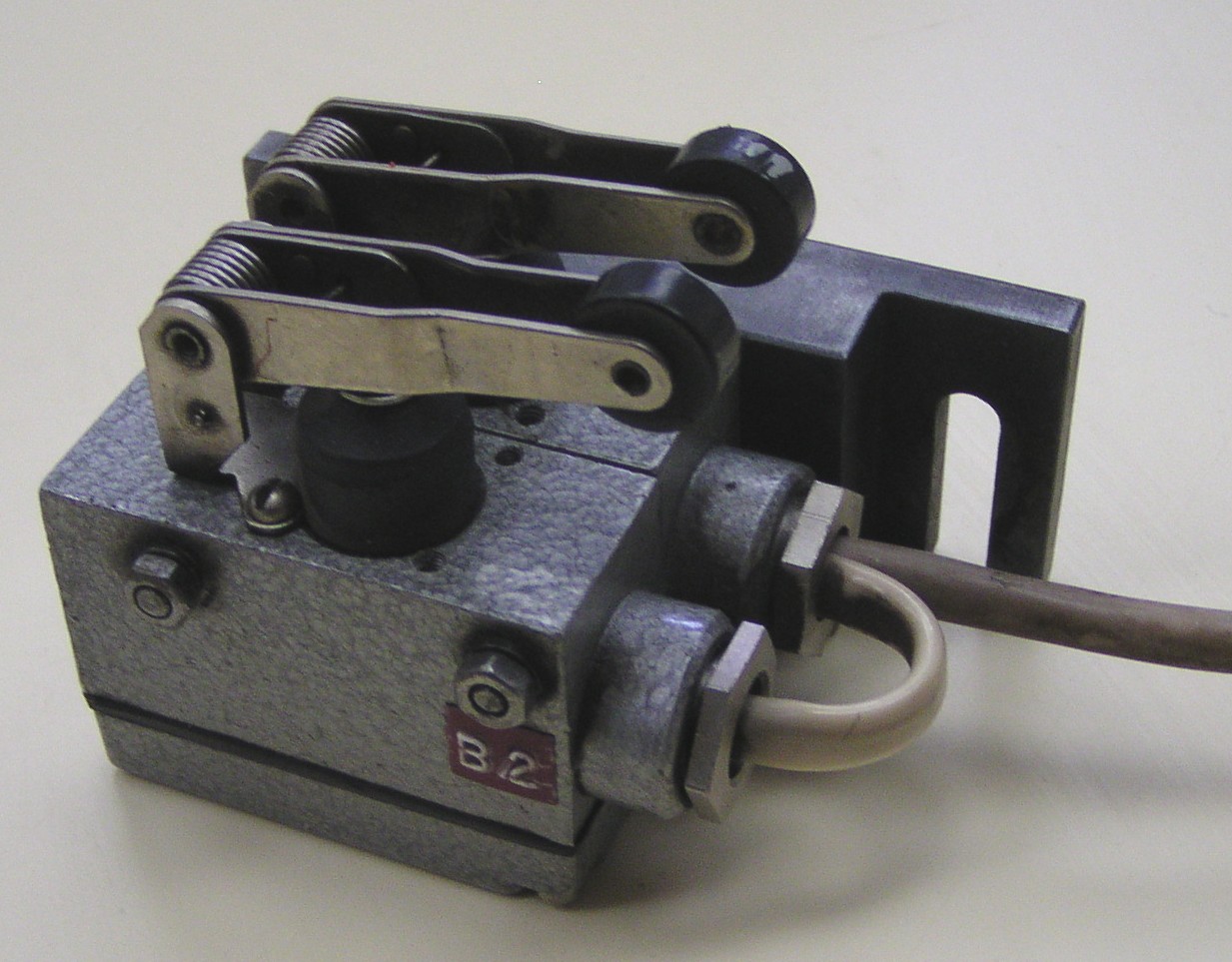
Obr. 7 - Snímače koncové polohy
Poloha a vzdálenosti - obecné pojmy o měření (délky, úhly)
Dělení snímačů dle signálu:
- analogové – změna odporu, indukčnosti, kapacity, napětí aj.
- číslicové – poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové)
Podle způsobu měření:
- absolutní – poloha zakódovaná
- přírůstkové (inkrementální) – impulsy se sčítají (integrují) v čítači
Analogový princip:
Odporové: potenciometry – lineární měří přímo vzdálenost
- rotační měří přímo úhel
Odporový materiál: kovový – dráha navinuta odporovým drátkem
nekovový – dráha nalepena na podkladě (tištěný způsob).
 R0 = R1 + R2
R0 = R1 + R2
V současnosti je RZ >> R0, dělič se
počítá naprázdno
![]() R1
R1
U1
R2 RZ U2
Přenos: 

Užití u méně náročných měření d>1‰ např. robotů a vysílačů měřených veličin (tlak, teplota). Přesnější měření je při napájení ss proudem. Při střídavém měření je přesnost ovlivněna indukčností nebo kapacitou odporové dráhy a přívodů.
Indukční snímače: měřená veličina (vzdálenost) mění indukčnost cívky,
magnetický obvod může být vzduchový, s jádrem, otevřený, uzavřený.
 Jednoduchý
mezerový
Jednoduchý
mezerový
závislost L na x
je nelineární L
0 x
![]() napájení je střídavé,
napájení je střídavé,
 protože je značně velká napájecí frekvence je impedance
cívky
protože je značně velká napájecí frekvence je impedance
cívky
XL=ωL větší než odpor R, proto se při zjednodušení může R zanedbat
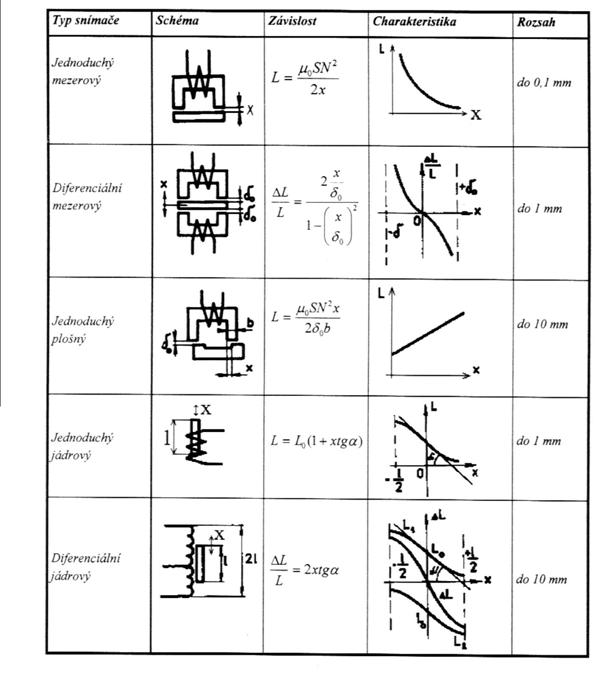
V připojené tabulce je porovnání různých typů indukčních snímačů
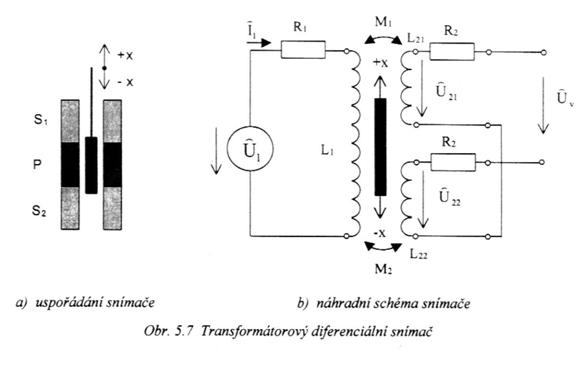
Transformátorový snímač – diferenciální obr. 5.7 lineární průběh ve větším rozsahu.
Často se používá v kontaktním uspořádání (jádro spojené s měřeným objektem).
Selsyny: slouží k měření polohy (úhlu natočení)
- rotační transformátor
zapojení obr. 5.10 snímač polohy zvaný: el. osa nebo tzv. "elektrický hřídel"
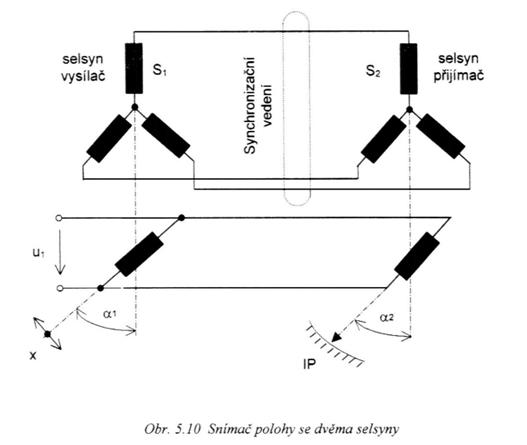

obr 5.13 - polohový transformátor
S1 – zadávání polohy
S2 – napětí (jeho fáze) úměrné natočení
Rozkladač Obr. 5.14 (resolver)
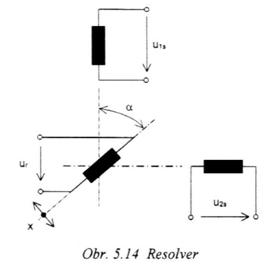
Dvě statorová svinutí – prostorově umístěné o 90˚ v rotoru jedno jednofázové svinutí.
Stator se napájí sin a cos.
Častěji se používá zapojení obráceně: do rotoru se napájí a ze statoru se odebírají dvě napětí:
![]()
![]()
Užití pro měření polohy – jednotka selsynů
Induktosyn – v podstatě selsyn bez železa
meandr - stator, pravítko 1 vinutí, stoupání 2 mm
- rotor, jezdec 2 vinutí posunuta o ± 90º
už se nepoužívají – roboty, obr. stroje
velký síťový šum
špatné rozlišení vyšší přesnosti
Snímače na principu vířivých proudů (indukční)
Přibližující se těleso (el. vodivé) zatlumí cívku a její L klesne – oscilace se utlumí a komparátor sepne výstup – relé - pro měření malých vzdáleností. Vyrábějí se zejména jako dvojhodnotové (bezkontaktní) narážky, též i analogové zpracování signálu.
Indukční snímač se skratovacím kroužkem
Cívka je navinuta na železném jádru a kroužek posuvem ovlivňuje indukčnost cívky.
Kroužek je z vodivého materiálu ( Cu, Al ) a vířivé proudy působí proti budícím a nepustí magnetické pole dál. Indukčnost cívky dosti lineárně závislá na vzdálenosti kroužku od cívky. Vyrábí se v mnoha variantách – diferenciální, pro měření úhlů aj.
Galvanomagnetické (magnetostatické) snímače
Tyto snímače zpracovávají Hallův jev a v druhém případě Gausův jev.
Princip činnosti: viz obr.:
Prostupuje-li mag. pole ( B ) kolmo tenkou polovodičovou destičkou (Si), která je protékaná elektrickým polem I , vytvoří se kolmo k proudu napětí UH (tzv. Hallovo). Toto napětí je úměrné velikosti pole.
Současně se zvyšuje odpor destičky podle parabolické závislosti R(B). Tento jev se nazývá Gausův (magnetorezistor).
Při použití polovodičové destičky lze metodou tenkých vrstev vytvořit integrovaný obvod, jež bude zpracovávat tyto jevy (UH, R(B)) podle požadavku měření. Často se tyto snímače vyrábí pro měření síly magnetického pole ve strojích (analogové), nebo jako komparační spínač, který indikuje jistou úroveň magnetického pole.
Užití: v automobilech pro řízení zapalování, měření otáček kol pro ABS aj..
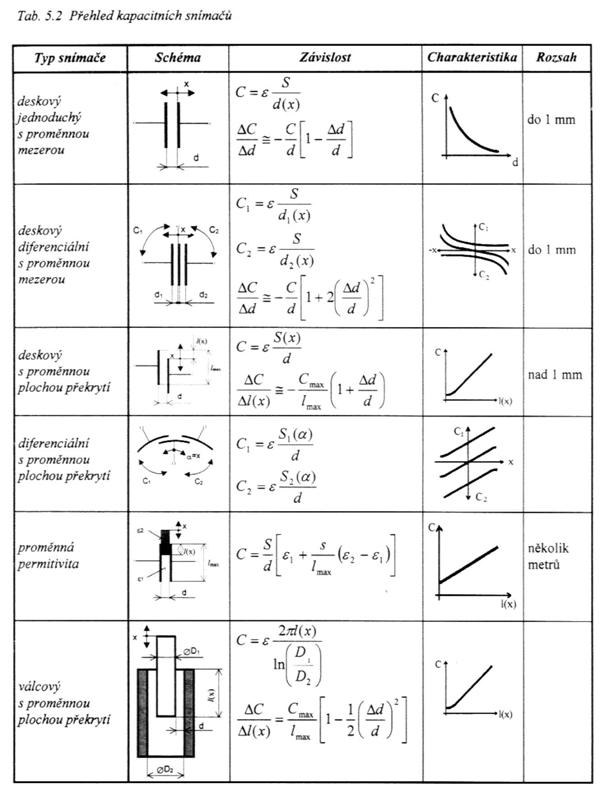
Kapacitní snímače – využívá se změny kapacity tabulka 5.2 str. 92
![]() - pro měření se
používají všechny změny:
- pro měření se
používají všechny změny:
e –dielektrická konstanta – materiál
S – velikost plochy desek
d – změna vzdálenosti
Používají se diferenciální můstky (XC) nebo rezonanční obvody (f)
změna C: desítky až stovky pF
Ultrazvukové měřiče vzdáleností:
Princip činnosti:
Vyslaný impuls ( několik desítek sinusových kmitů o frekvenci asi 100 kHz ) se odrazí od přepážky a měří se doba jeho návratu t . Tato doba je lineárně závislá na vzdálenosti x.
Laserové interferometry: interference – skládání obr. 5.20
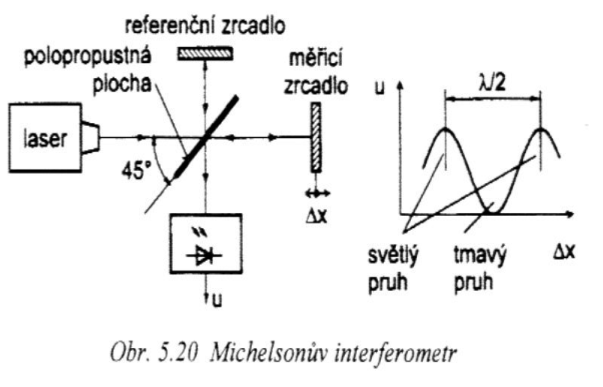
hrubá stupnice – počet se čítá v čítači ( ~ 0,3 mm)
jemná interpolace – zjišťuje se poloha mezi dvěma světelnými maximy
Číslicový princip:
Číslicové snímače polohy (značně rozvinutý princip pro snímání polohy os na obráběcích strojích).
Jsou nejčastěji na fotoelektrickém principu:
- inkrementálními – přírůstkové – v čítači se integruje poloha
- absolutní – po dekódování poloha
konstrukční dělení - rotační
- lineární
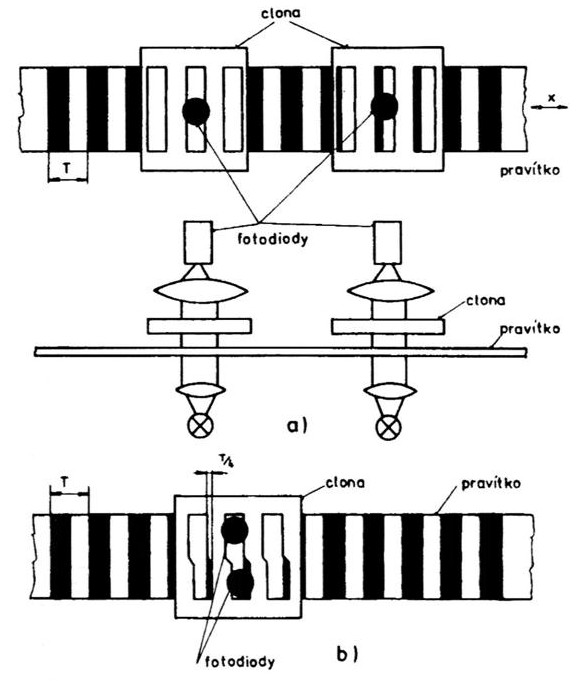
Slova: dělení rysek 0,01 – 0,1 mm
mřížka – pravítko, kotouček
protimřížka (clonka) – důvod velké senzory (fototranzistory, fotodiody) vůči
jemnému dělení
Ze snímače vystupují dva signály I a I ± 90. Důvod: takto lze rozpoznat, kterým směrem se pohybuje (otáčí) měřený objekt.
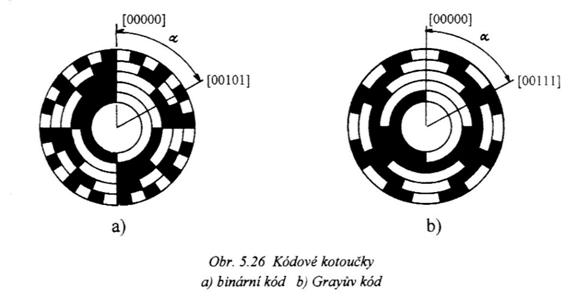
Pro absolutní odměřování se užívá kódovací
kotouček nebo pravítko (obr. 5.26). Poloha je v něm zakódovaná. Používá se GRAYův kód – je
samoopravný, protože při přesunu na sousední polohu (inkrement), nastává změna
v kódu, jen v jednom bitu. Počet bitů je dán požadovanou přesností
d
![]() kde N = , N = počet rozlišitelných hladin a I = počet bitů ve snímači.
Zde bity nemají váhu. Oproti binárnímu kódu nemůže změna nastat ve více bitech.
Při náhodné ztrátě jednoho bitu počítač počká na další impuls, kde je poloha již
správná.
kde N = , N = počet rozlišitelných hladin a I = počet bitů ve snímači.
Zde bity nemají váhu. Oproti binárnímu kódu nemůže změna nastat ve více bitech.
Při náhodné ztrátě jednoho bitu počítač počká na další impuls, kde je poloha již
správná.
Proximitní snímače: proximita = blízkost ( vzdálenost v blízkém okolí )
Diskrétní snímače polohy: mechanické kontaktní; předmět přepne spínač (mikrospínač). Dva stavy - "vede" a "nevede". Používají se v narážkových systémech, též jako doplňující (ochranný) princip – jiným způsobem (bezkontaktním).
Slitiny kontaktů: aby byly odolné vůči elektrickým obloukům
Pb –Ir, Ag – grafit, malý přechodový odpor
pro velká napětí mžikový odskok ( rychlé přerušení - žabka)

Poděkování: Investice do rozvoje vzdělávání. Tento výukový text je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky v rámci projektu č. CZ.1.07/2.2.00/28.0206 „Inovace výuky podpořená praxí“.
Zpět na hlavní stránku ׀ Zpět na seznam praktických cvičení ׀ Měření polohy ׀ Nakreslení blokového schématu měření
Katedra konstruování strojů - JF - Předmět Měřící Technika (KKS/MT)
Copyright © 2014 ZČU v Plzni - Fakulta strojní, Katedra konstruování
strojů. Všechna
práva vyhrazena.
Poslední aktualizace:
10. 06. 2014