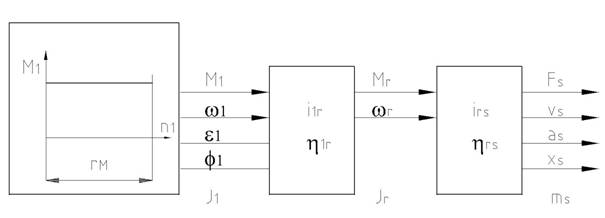
Obr. 1 - Blokové schéma posuvového mechanizmu
Posuvový mechanizmus slouží pro transformaci energie a informací. Sestává z vstupní části - (servomotor, vstupní převod) a výstupní části (výstupní převod, stůl nebo pinola, suport, vřeteno atd). Je řízen v polohové vazbě – je vybaven odměřováním polohy - tím se dosahuje velkého regulačního rozsahu motoru při konstantním momentu (viz Obr. 2). Podmínkou funkce je vymezení vůlí v posunovém mechanizmu.
Na Obr. 1 jsou použity tyto veličiny:
M1 …moment motoru
w1 ….úhlová rychlost motoru
j1 ….úhlové natočení motoru
Mr …moment na vstupu finálního členu mechanizmu
wr ….úhlová rychlost na vstupu finálního členu mechanizmu
Fs …síla na výstupní části mechanizmu
vs …. rychlost výstupní části mechanizmu
xs …. dráha výstupní části mechanizmu
i1r …převod mechanizmu mezi motorem a finálním členem ( vstupní převod)
h1r …účinnost mechanizmu mezi motorem a finálním členem
irs …finální převod mechanizmu
hrs …účinnost finálního členu mechanizmu
Charakteristika motoru (Obr. 2)
Pro posuvové mechanizmy se v současné době používají převážně střídavé servopohony.
Dle [2] má servomotor řady 1FT6 tyto charakteristické veličiny:
· závislost klidového krouticího momentu na otáčkách do jmenovitých otáček nn (trvalý provoz S1):
M0(60K) ….. při nárůstu teploty vinutí o 60°K
M0(100K) ….. při nárůstu teploty vinutí o 100°K
· jmenovitý moment při jmenovitých otáčkách nn :
MN(100K) ….. při nárůstu teploty vinutí o 100°K
· jmenovité otáčky nn
· regulační rozsah otáček při konstantním momentu: rM = 10000
· teoretický výkon motoru Pcalc daný vztahem
![]()
· hmotnostní moment setrvačnosti rotoru J
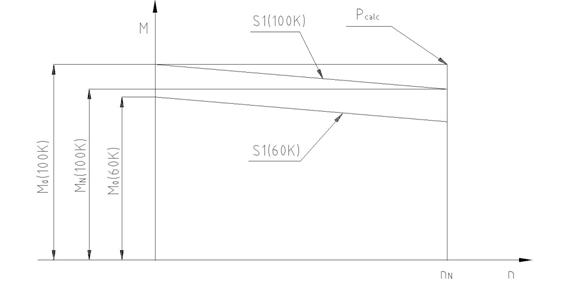
Obr. 2 – Charakteristika servomotoru
Kinematické a energetické vztahy
· vstupní převod (převod mezi motorem a finálním členem):
![]()
· vztah mezi otáčkami a úhlovou rychlostí
![]()
· finální převod - převod rotačního pohybu na přímočarý:
![]()
(h) je stoupání kuličkového šroubu nebo hydrostatického šneku, při užití hřebenu a pastorků je (h) obvod pastorku
· celkový převod mezi motorem a saněmi:
![]()
Dosazením:
![]()
![]()
· výkon
![]()
![]()
kde P1 je výkon motoru, h1s je celková účinnost daná vztahem:
![]()
· moment motoru
![]()
dosazením
![]()
![]()
· moment na vstupu finálního členu mechanizmu
![]()
dosazením
![]()
![]()