Kružnicový diagram asynchronního stroje
Kružnicový (kruhový) diagram asynchronního stroje je vlastně zobrazením polohy koncového vektoru proudu do komplexní roviny při různé velikosti skluzu stroje. Existuje řada variant konstrukce kružnicového diagramu, přičemž jednoznačně nejpřesnější způsob je přímé provedení kruhové inverze impedanční přímky v komplexní rovině tak, jak ji popisuje prof. Bartoš v [1]. Uvedená konstrukce je ale bez značné pomoci výpočetní techniky téměř nerealizovatelná, proto existují různé zjednodušující konstrukce. Nejznámější z nich je Heylandova kružnice (platná pro stroje od výkonu cca 10 kW, zanedbává odpor statoru a ztráty v železe), respektive její zpřesněná forma zvaná Ossanova kružnice (nebo Ossanova korekce; uvažuje odpor statoru, zanedbává však ztráty v železe), která platí i pro stroje s výkonem menším než 10kW. Prof. Bašta pak navrhuje použití jiného korigonavého postupu, který uvažuje ztráty v železe i odpor statoru [2].
Všechny uvedené konstrukce však vyžadují značnou znalost parametrů náhradního schématu asychronního stroje, pro grafické znázornění výsledků měření jsou tedy tyto konstrukce kružnicového diagramu nepoužitelné. Pro konstrukci z měření lze použít například postup uvedený v knize G. N. Petrova [3] nebo postup používaný na ZČU [4], oba používající přímo výsledky měření naprázdno a nakrátko. V obou případech se pak používá odlišný typ korekce polohy středu kružnicového diagramu, přičemž postup používaný na ZČU je použitelný pro stroje s ložisky ve "velmi dobré kondici," neboť prakticky zanebává mechanické a přídavné ztráty ve stroji.
Pozn.: Samostatnou otázkou je pak kontroverze názvu kruhový vs. kružnicový diagram. Důvodem je fakt, že kruh je označením plochy, zatímco kružnice je označením křivky. Koncový vektor proudu asynchronního stroje přitom opisuje křivku v komplexní rovině, proto se jeví jako správnější označení kružnicový diagram.
Než začnete s konstrukcí...
(přejít přímo na konstrukci / odečet hodnot)
Ještě než začneme se samotnou konstrukcí, je vhodné zmínit, pro které stroje kružnicový diagram platí. Takže: kružnicový diagram asynchronního stroje platí pro stroje s vinutou kotvou a přibližně pro stroje s "jednoduchou" klecí nakrátko. V případě strojů s vírovými či Boucherotovými kotvami přechází kružnice na jiné tvary a kružnicový diagram pro ně platí pouze v lineární části momentové charakteristiky, dále přechází na křivky vyšších řádů (bramboroidy :-) ). Dalším důležitým předpokladem je, že kružnicový diagram je konstruován pro konstantní napětí, zpravidla jmenovité, tedy Un.
Nyní k samotnému kružnicovému diagramu. Jeho konstrukce vychází z hodnot získaných během měření asynchronního stroje naprázdno a nakrátko, dále pak ze znalosti odporů statoru R1 a rotoru R2'. Předpokládejme tedy nějaký asynchroní stroj s následujícími štítkovými hodnotami, pro který budeme konstruovat kružnicový diagram podle [4]:
Un = 400 V
In = 10,5 A
n = 890 ot/min
Pro daný stroj byly naměřeny následující hodnoty:
| naprázdno | nakrátko | odpory |
| I0 = 8,77 A | Ik = 10 A | R1 = 0,42 Ω |
| φ0 = 83,1° | Uk = 107 V | R2' = 0,50 Ω * |
| φk = 53,13° |
*) R2' je zde hodnota odporu rotoru přepočtená na stator. V některé literatuře bývá též označován jako R21.
Vzhledem k tomu, že jeden z předpokladů konstrukce kružnicového diagramu je konstantní napětí, je třeba ještě před samotnou konstrukcí přepočítat proud nakrátko stroje na jmenovité napětí. To je:
Ikn = Un/Uk*Ik = 400/107*10 = 37,38 A
Povšimněte si, že tato hodnota je vyšší nežli změřený proud nakrátko! Zapamatujete si tak, že je třeba provést tento přepočet.
Jako poslední věc před začátkem samotné kontrukce je třeba si zvolit měřítko proudů mi. To si zvolte samostatně podle limitů papíru, na který se chystáte kružnicový diagram rýsovat. V mém případě volím rýsování v programu QCad (Community Edition) a nemusím tedy měřítko řešit. Pro celý další postup a všechny uvedené výkresy je mi = 1 A/mm.
Konstrukce diagramu z naměřených hodnot

Jako první krok je třeba si zvolit rovinu, ve které budeme kružnicový diagram konstruovat. Tou je komplexní rovina orientovaná tak, že osa reálných čísel míří vzhůru a osa imaginárních čísel míří vpravo. Do reálné osy se pak promítá svorkové napětí stroje, které však pro přehlednost není ve výkresech zakresleno.
Vůči imaginární ose pak budou odečítány příkony stroje, jde tedy o tzv. přímku příkonů PP.

V druhém kroku zakreslíme proudy naprázdno a nakrátko v příslušném úhlu vůči reálné ose a tedy i vůči svorkovému napětí.

Nyní je třeba najít střed kružnice, po které se pohybují proudy. Ten je zcela jistě umístěn na ose tětivy vytýčené body I0 a Ik. Narýsujeme tedy spojnici těchto bodů a zkonstruujeme její osu, o1.

Další osou, na které se střed kružnice nachází je osa úsečky rovnoběžné s reálnou osou, vymezené bodem I0 a fázorem Ik. Narýsujeme tedy v bodě I0 rovnoběžku s reálnou osou a ukončíme ji v jejím průsečíku s fázorem Ik. Pak nalezneme její osu o2, kterou též narýsujeme.
Pozn.: Právě v tomto bodě se odlišují konstrukce uvedené ve [4] a [3]. Konstrukce uvedená ve [3] vytváří pomocný bod založený na bodu I0, od kterého se dále odečítají mechanické a přídavné ztráty. Z absence tohoto kroku v popisovaném postupu lze předpokládat, že tyto ztráty tímto krokem zanedbáváme.

Nyní víme, kde se nachází střed hledané kružnice - na průsečíku os o1 a o2. Poloměr kružnice je dán vzdáleností středu a koncových bodů fázorů proudů Ik a I0. Nyní tedy lze zakreslit střed kružnice proudů S a samotnou kružnici k.

Následuje konstrukce vedoucí k nalezení stupnice, na které bude v lineárním měřítku vynesen skluz. Nejprve je ale třeba vynést pomocnou přímku, která je rovnoběžná s imaginární osou a prochází bodem I0. Vzdálenost mezi touto přímkou a imaginární osou pak udává ztráty naprázdno v asynchronním stroji, které předpokládáme v tomto případě pro všechny provozní stavy jako konstantní.

Další významnou přímkou v kružnicovém diagramu je přímka momentů. Před jejím sestrojením je ale třeba nalézt pomocný bod M, kterým prochází. Ten je umístěn na úsečce rovnobězné s reálnou osou, jejímž jedním koncovým bodem je bod Ik a druhým je její průsečík s přímkou vynesenou v předchozím kroku.

Bod M je na této úsečce umístěn tak, že ji dělí v poměru velikostí odporů R1 a R2', přičemž část odpovídající odporu R2' je v její horní části. Číselně je poměr, ve kterém je vzdálen na úsečce bod M od bodu Ik:
k = R2'/(R1 + R2') = 0,50/(0,42+0,50) = 0,54
Narýsovaná úsečka má délku 21,75mm, vzdálenost bodu M a bodu Ik bude tedy:
|Ik; M| = k*21,75 = 0,54*21,75 = 11,75mm

Za pomoci získaného bodu M již lze zkonstruovat přímku momentů PM. Tato přímka je určena body M a I0. Průsečík přímky PM a kružnice k je koncovým bodem fázoru proudu, který by strojem procházel při připojení k síti a nekonečných otáčkách rotoru. Tento bod je označen I∞. Vůči této přímce budou dále odečítány momenty.

Hledaná stupnice skluzů s je rovnoběžná s nalezenou přímkou momentů PM. S ohledem na přehlednost celé konstrukce je vhodné ji vynést mimo kružnicový diagram.
Pozn.: V některých konstrukcích lze nalézt stupnici skluzů vynesenou ve svislém směru. V tomto případě se na stupnici vynáší převrácená hodnota skluzu a pro malé skluzy je tedy problematické jeho odečítání.
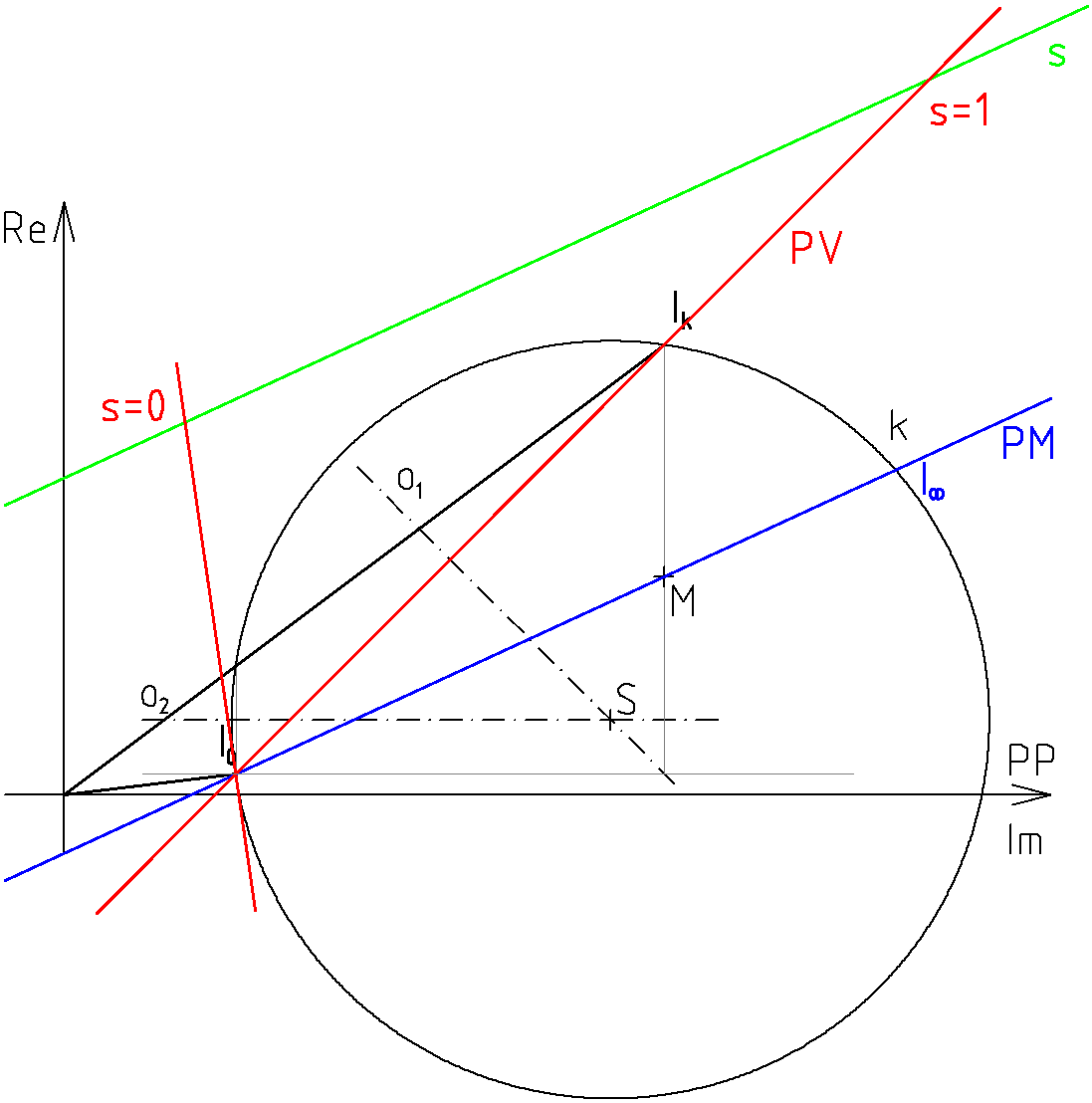
Stupnici skluzů s je třeba označit tak, aby bylo možné na ní nalézt body pro skluzy s = 0 a s = 1. Stupnice mezi těmito body pak bude lineární. Bod, odpovídající skluzu s = 0 se nachází na tečně ke kružnici k v bodě I0 a zároveň na stupnici skluzů. Je tedy v průsečíku těchto dvou přímek.
Pozn.: Do této tečny se zároveň promítá fázor indukovaného napětí rotoru asynchronního stroje.
Bod odpovídající skluzu s=1 se nachází v průsečíku prodloužené spojnice bodů I0 a Ik s přímkou skluzů s. Přímka procházející body I0 a Ik se nazývá přímka výkonů PV a bude od ní dále odečítán výkon asynchronního stroje na hřídeli.

Další významnou přímkou v kružnicovém diagramu je přímka účinností. Přímka účinnosti je rovnoběžná s imaginární osou a protíná se se stupnicí skluzů v bodě s = 0. V tomto bodě má stroj nulovou účinnost, na přímce účinnosti jde tedy o bod η = 0%.

Bod η = 100% pak lze získat tak, že přímku výkonů protáhneme až do jejího průsečíku s reálnou osou. V tomto průsečíku vytvoříme rovnoběžku s dříve získanou tečnou ke kružnici k (tou, která prochází bodem I0). V bodě, kde se tato tečna protne s přímkou účinností dosahuje stroj účinnosti η = 100%. Stupnice mezi body η = 0% a η = 100% je pak lineární, stejně jako stupnice skluzů.

Kružnicový diagram je tímto hotov. V této fázi je pouze nutné ocejchovat stupnice skluzů a účinností od s = 0 do s = 1, respektive od η = 0% do η = 100%. To již lze provést libovolnou geometrickou konstrukcí a s libovolnou požadovanou jemností. V řešeném příkladě byly obě osy ocejchovány deseti dílky stupnice.
Výkresy ke konstrukční části kružnicového diagramu pak lze stáhnout ze sekce Ke stažení.
Odečet výsledků z kružnicového diagramu
To, že lze kružnicový diagram sestrojit je sice hezké, ale je třeba jej umět i správně využít - naučit se v něm orientovat a číst z něj hodnoty. K tomu je zapotřebí určit si několik dalších měřítek.
Měřítko výkonuslouží pro odečet výkonů z kružnicového diagramu. Určí se ze vztahu:
mp = √3 *Un*mi [VA/mm]
Pro studovaný motor je:
mp = √3 *400*1 = 692,82 VA/mm
Měřítko momentůslouží pro odečet momentů z kružnicového diagramu. Pro jeho výpočet lze použít vztah:
mm = mp/ωs [Nm/mm]
ωs je zde synchronní úhlovou rychlostí otáčení stroje. Pro synchronní rychlost studovaného motoru je:
ωs = π*ns/30 [rad.s-1]
číselně:
ωs = π*1000/30 = 104,7 rad.s-1
Měřítko momentů má tedy velikost:
mm = 692,82/104,7 = 6,62 Nm/mm

Nyní lze z kružnicového diagramu odečítat. Po sestrojení stupnice již stačí pouze zvolit, pro který skluz budeme odečítat hodnoty. Předpokládejme, že chceme získat hodnoty pro velikost skluzu s=0,4. Pouze upozornění - Pro přehlednější odečet hodnot z kružnicového diagramu jsem z něj odstranil několik konstrukčních čar. V *.dxf souboru je možné si je následně zobrazit zapnutím příslušné hladiny.
Nejprve je třeba nalézt na stupnici skluzů bod odpovídající skluzu s=0,4.

Dále je třeba narýsovat spojnici bodů s=0,4 a I0. Na průsečíku této spojnice s kružnicí k se nachází koncový bod fázoru proudu pro skluz s=0,4, bod I0,4.
 1. Odečet proudů
1. Odečet proudů
Pro odečtení proudu stačí jednoduše spojit bod I0,4 s počátkem souřadnic. Velikost výsledné úsečky násobená měřítkem proudů mi udává velikost proudu, který stroj odebírá při skluzu s=0. Úhel mezi touto úsečkou a reálnou osou pak ukazuje fázový posuv proudu za napětím. V tomto konkrétním případě:
I0,4 = 28,84*mi=28,84*1 = 28,84 A
φ0,4 = 41,97°
cos φ0,4 = cos 41,97° = 0,7435
 2. Odečet výkonů
2. Odečet výkonů
Pro odečet výkonů je třeba sestrojit rovnoběžku s reálnou osou, která prochází bodem I0,4. Velikosti výkonů se odečítají na této rovnoběžce a jdou dány vzdáleností bodu I0,4 od průsečíků této rovnoběžky s přímkami výkonu a příkonu (imaginární osou). Vynásobením těchto vzdáleností měřítkem výkonu vychází výkon a příkon stroje pro skluz s=0,4. Číselně:
Pp0,4 = 20,70*mp = 20.70*692,82 = 14,34 kW
P0,4 = 9,71*mp = 9,71*692,82 = 6,73 kW
Odtud lze určit účinnost stroje jako
η0,4 = P0,4/Pp0,4 = 6,73/14,34 = 0.45 = 45 %
Pozn.: V případě výkonu stroje na hřídeli ale tento postup odečtu není zcela korektní. Vhodnějším postupem by bylo odečítat činný výkon stroje na hřídeli na rovnoběžce s tečnou ke kružnici k v bodu Ik, neboť právě vůči ní má proud v rotoru účiník cos φ=1.
 3. Odečet ztrát
3. Odečet ztrát
Ztráty pak lze odečítat vůči pomocné přímce vedené skrze bod I0 rovnoběžně s imaginární osou. Vzdálenost této pomocné přímky od imaginární osy udává velikost ztrát v železe. Vzdálenost průsečíku úsečky pro odečítání výkonů s přímkou výkonů od této pomocné přímky pak udává velikost Jouleových ztrát, které lze vůči přímce momentů dále rozdělit na Jouleovy ztráty statoru a rotoru. V našem případě:
ΔPFe = 1.05*mp = 1.05*692,82 = 727,46 W
ΔPj1 = 4.56*mp = 4.56*692,82 = 3,16 kW
ΔPj2 = 5.37*mp = 4.56*692,82 = 3,72 kW
 4. Odečet momentů
4. Odečet momentů
Odečet momentů probíhá analogicky s odečtem výkonů, pouze s tím rozdílem, že je třeba určovat vzdálenost bodu I0,4 od průsečíku rovnoběžky s reálnou osou s přímkou momentů. Dále je třeba výslednou hodnotu vynásobit měřítkem momentů. Pro sledovaný stroj vychází:
M0,4 = 15,08*mm = 15,08*6,62 = 99,83 Nm
Pozn.: I v tomto případě by bylo vhodnější odečítat moment stroje na hřídeli na rovnoběžce s tečnou ke kružnici k v bodu Ik (vůči ní má proud v rotoru účiník cos φ=1).
 5. Odečet účinnosti stroje
5. Odečet účinnosti stroje
K odečtu účinnosti stroje je třeba oživit pomocnou konstrukci pro získání bodu η = 100%. Z průsečíku přímky výkonů s reálnou osou je v tomto případě nutno vést přímku skrze bod I0,4 ke stupnici účinností. Na ní lze přímo odečíst účinnost stroje jako poměr vzdálenosti výsledného bodu od počátku stupnice ku její celkové velikosti.
η0,4 = 16,97/41,44 = 0,41 = 41%
Vzhledem k přesnosti kružnicového diagramu (cca 5%) jde o dobrou shodu obou výsledků vůči výsledku obrženému v bodu 2.
Výkresy k odečtu hodnot z kružnicového diagramu si můžete stáhnout ze sekce Ke stažení. Pro srovnání pak můžete výslednou konstrukci porovnat s Heylandovým diagramem uvedeným v [5] a [6] (obě konstrukce však obsahují drobné odchylky od Heylandovy kružnice).
Použitá literatura
[1] BARTOŠ, V.: Teorie elektrických strojů. Skripta ZČU, Plzeň, 2006. ISBN 80-7043-509-7
[2] BAŠTA, J.: Teorie elektrických strojů. Nakladatelství ČSAV, Praha, 1956. DT 621.313.01
[3] PETROV, G. N.: Elektrické stroje 2. Academia, Praha, 1982. ISBN 21-055-80
[4] BARTOŠ, V.; SKALA, B.: Měření na elektrických strojích. Skripta ZČU, Plzeň, 2006. ISBN 80-7043-447-3
[5] WIKIMEDIA FOUNDATION, Inc.: Circle diagram. [online], 2013, [cit. 4. 4. 2013].
<http://en.wikipedia.org/wiki/Circle_diagram>
[6] WIKIMEDIA FOUNDATION, Inc.: Kruhový diagram asynchrónneho motora. [online], 2013, [cit. 4. 4. 2013].
<http://sk.wikipedia.org/wiki/Kruhov%C3%BD_diagram_asynchr%C3%B3nneho_motora>